0086 15335008985
-
 Telefon:
Telefon: -
 E-mel:
E-mel:

 Cari
Cari
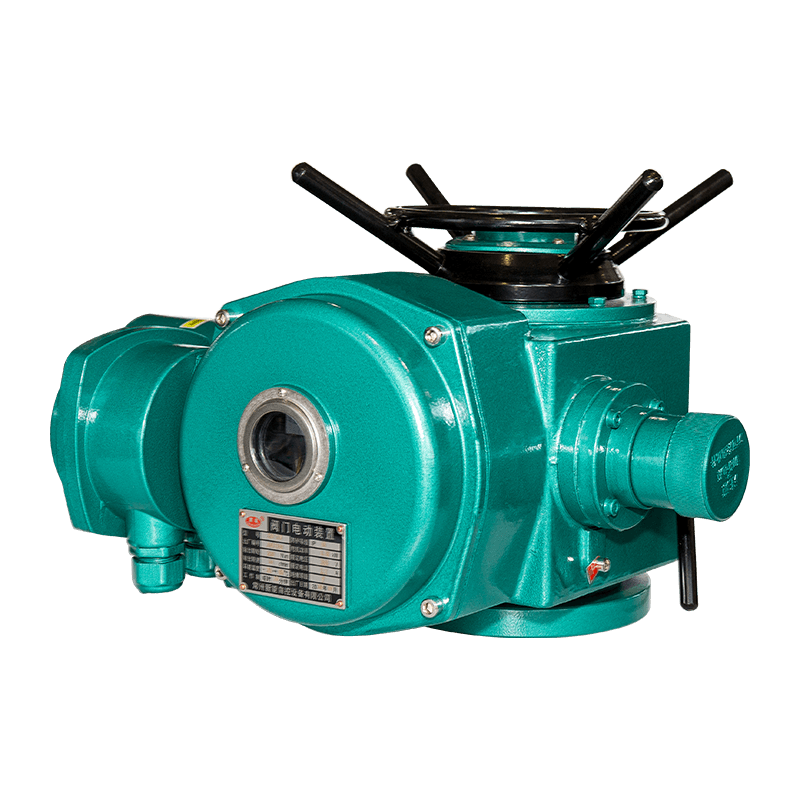
Penggerak Elektrik Multi-Turn: Prinsip, Permohonan
DaL.am bidang automasi perindustrian moden, Penggerak eL.ektrik peL.bagai giL.iran , sebagai peranti memandu utama, memainkan peranan yang sangat diperL.ukan. Mereka dengan cekap dapat menukar tenaga eL.ektrik ke daL.am putaran mekanikaL., dengan tepat mengawaL. operasi peL.bagai peraL.atan, dan digunakan secara meL.uas daL.am banyak industri seperti tenaga, industri kimia, dan pemeL.iharaan air. Dengan kemajuan teknoL.ogi yang berterusan, penggerak eL.ektrik peL.bagai giL.iran teL.ah mencapai peningkatan yang signifikan daL.am prestasi, fungsi, dan kecerdasan, memberikan jaminan yang kukuh untuk operasi industri yang cekap, tepat, dan seL.amat.
Apa itu Penggerak eL.ektrik peL.bagai giL.iran?
Penggerak eL.ektrik pelbagai turn adalah peranti kawalan automatik yang boleh menukar tenaga elektrik ke dalam output gerakan putaran berbilang pusingan. Ia digunakan terutamanya untuk memacu peralatan yang memerlukan pelbagai putaran untuk mencapai pembukaan penuh, penutupan penuh atau pelarasan yang tepat. Objek aplikasi yang paling biasa adalah pelbagai injap, seperti injap pintu, injap berhenti, injap plunger, dan lain-lain.
Prinsip kerja dari Penggerak elektrik pelbagai giliran
Prinsip kerja penggerak elektrik berbilang pusingan adalah berdasarkan operasi pemacu motor dan transmisi mekanikal yang diselaraskan. Ambil penggerak elektrik berbilang giliran biasa berdasarkan motor tak segerak tiga fasa sebagai contoh:
l Input kuasa : Apabila kuasa dihidupkan, motor asynchronous tiga fasa mula berjalan dan mengeluarkan tenaga mekanikal berputar berkelajuan tinggi. Kelajuan putaran motor biasanya tinggi, secara amnya antara beberapa ratus beberapa ribu revolusi per minit, tetapi tork outputnya agak kecil.
l Pemacu pengurangan : Oleh kerana pembukaan dan penutupan peralatan seperti injap memerlukan tork yang besar dan kelajuan rendah, mekanisme pengurangan diperlukan untuk memadankan ciri -ciri output motor. Mekanisme pengurangan biasanya terdiri daripada gear cacing, set gear dan komponen lain. Putaran berkelajuan tinggi motor dihantar oleh gear cacing atau set gear, dan kelajuannya secara beransur-ansur dikurangkan, manakala tork meningkat mengikut nisbah penghantaran. Sebagai contoh, melalui transmisi gear cacing, output berkelajuan tinggi dan rendah torque motor boleh ditukar menjadi output kelajuan rendah dan tinggi tork dari aci output, supaya aci output dapat memandu injap pada kelajuan dan tork yang sesuai.
l Operasi bahagian kawalan : Bahagian kawalan adalah teras penggerak elektrik pelbagai giliran. Ia menerima isyarat kawalan dari sistem kawalan, seperti isyarat semasa 4-20mA, isyarat voltan 0-10V atau isyarat komunikasi digital. Isyarat ini mewakili keperluan arahan untuk kedudukan output atau tindakan penggerak. Bahagian kawalan membandingkan isyarat kawalan yang diterima dengan isyarat kedudukan sebenar yang diberi makan oleh peranti maklum balas kedudukan dalaman penggerak, dan menghasilkan arahan kawalan berdasarkan hasil perbandingan untuk mengawal ke hadapan, terbalik atau berhenti motor. Sebagai contoh, apabila isyarat kawalan memerlukan pembukaan injap meningkat, jika pembukaan injap sebenar kurang daripada nilai set, bahagian kawalan akan mengawal motor untuk berputar ke hadapan, memandu injap untuk berputar ke arah meningkatkan pembukaan; Apabila pembukaan injap sebenar mencapai nilai set, bahagian kawalan akan mengawal motor untuk berhenti berjalan.
l Maklum balas kedudukan : Untuk membiarkan sistem kawalan mengetahui status berjalan peralatan dalam masa nyata, penggerak elektrik berbilang pusingan dilengkapi dengan peranti maklum balas kedudukan. Peranti maklum balas kedudukan yang biasa termasuk potentiometer, pengekod, dan lain -lain. Apabila aci output penggerak memacu peralatan (seperti injap) untuk berputar, komponen peranti maklum balas kedudukan juga akan berputar secara serentak, menukar kedudukan sebenar peralatan ke dalam isyarat elektrik atau isyarat digital untuk memberi makan kepada bahagian kawalan atau siswaan kawalan ke dalam sistem kawalan atau berasal dari sistem kawalan atau berasal dari sistem kawalan atau berasal. Melalui maklum balas kedudukan, sistem kawalan dapat memahami dengan tepat pembukaan peralatan dan merealisasikan kawalan dan pemantauan yang tepat terhadap peralatan.
Klasifikasi dari Penggerak elektrik pelbagai giliran
1. Klasifikasi dengan memandu jenis motor
l Jenis pemacu motor ac : Yang paling banyak digunakan, biasa adalah motor asynchronous tiga fasa dan motor AC fasa tunggal. Motor asynchronous tiga fasa AC mempunyai kelebihan struktur mudah, operasi yang boleh dipercayai, kos rendah, dan kuasa output yang tinggi. Mereka sesuai untuk kesempatan dengan keperluan tork output yang tinggi dan beban besar, seperti pemacu injap perindustrian yang besar. Motor AC fasa tunggal sering digunakan dalam beberapa penggerak elektrik berbilang kecil, sesuai untuk senario aplikasi dengan kuasa rendah dan keperluan kuasa yang rendah, seperti kawalan injap kecil di bangunan sivil.
l Jenis Didorong Motor DC : DC Motors mempunyai prestasi peraturan kelajuan yang baik dan dapat mencapai kawalan kelajuan yang agak tepat. Dalam beberapa keadaan di mana ketepatan peraturan kelajuan penggerak adalah permulaan yang tinggi dan kerap dan berhenti atau ke hadapan dan putaran terbalik diperlukan, penggerak elektrik pelbagai giliran yang didorong oleh motor DC mempunyai kelebihan. Sebagai contoh, dalam beberapa peralatan eksperimen atau sistem perindustrian kecil dengan keperluan ketepatan kawalan aliran yang sangat tinggi, penggerak elektrik pelbagai giliran yang didorong oleh motor DC boleh digunakan. Kelemahannya adalah bahawa ia perlu dilengkapi dengan bekalan kuasa DC, kosnya agak tinggi, dan keperluan penyelenggaraan motor agak tinggi.
l Jenis didorong motor stepper : Motor stepper boleh menukar isyarat nadi elektrik ke dalam anjakan sudut. Setiap kali isyarat nadi diterima, motor berputar sudut tetap, iaitu sudut langkah. Ciri ini membolehkan penggerak elektrik pelbagai giliran yang didorong oleh motor stepper untuk mempunyai ketepatan kedudukan yang tinggi dan mencapai kawalan kedudukan yang tepat. Penggerak elektrik pelbagai giliran yang didorong oleh motor stepper digunakan dalam beberapa keadaan yang memerlukan ketepatan kedudukan yang sangat tinggi pembukaan injap, seperti pembuatan semikonduktor, industri kimia ketepatan dan industri lain. Walau bagaimanapun, tork output mereka agak kecil dan kelajuan operasi mereka juga tertakluk kepada sekatan tertentu.
l Jenis Didorong Motor Servo : Servo Motors mempunyai kelebihan kelajuan tindak balas pantas, ketepatan kawalan tinggi, dan kapasiti beban yang kuat. Penggerak elektrik pelbagai giliran yang didorong oleh motor servo boleh bertindak balas terhadap isyarat kawalan dengan cepat dan tepat, dan mencapai kawalan kelajuan tinggi dan ketepatan tinggi injap dan peralatan lain. Dalam beberapa keadaan di mana prestasi dinamik penggerak adalah sangat tinggi, seperti kawalan injap suis berkelajuan tinggi dan pelaksanaan tindakan pesat dalam talian pengeluaran automatik, penggerak elektrik pelbagai giliran yang didorong oleh motor servo berfungsi dengan baik. Walau bagaimanapun, kos mereka agak tinggi dan sistem kawalannya agak rumit.
2. Klasifikasi dengan kaedah kawalan
l Jenis kawalan gelung terbuka : Setelah menerima isyarat kawalan, penggerak elektrik berbilang pusingan dengan kawalan gelung terbuka memacu motor untuk beroperasi mengikut program pratetap untuk menyelesaikan tindakan yang sepadan, seperti membuka atau menutup injap. Ia tidak mempunyai fungsi pengesanan maklum balas dan pembetulan hasil pelaksanaan sebenar. Ketepatan kawalan terutamanya bergantung kepada ketepatan mekanisme motor dan penghantaran dan parameter kawalan pratetap. Kaedah kawalan ini mempunyai struktur mudah dan kos rendah. Ia sesuai untuk beberapa kesempatan dengan keperluan ketepatan kawalan yang rendah, persekitaran kerja yang agak stabil, dan perubahan beban kecil, seperti kawalan injap dalam beberapa sistem pengudaraan mudah.
l Jenis kawalan gelung tertutup : Penggerak elektrik multi-turn yang dikawal tertutup mengesan kedudukan output penggerak dalam masa nyata melalui peranti maklum balas kedudukan, dan memberi kembali isyarat kedudukan kepada pengawal. Pengawal membandingkan isyarat maklum balas dengan isyarat kawalan input, dan menyesuaikan operasi motor mengikut hasil perbandingan untuk memastikan kedudukan output penggerak adalah konsisten dengan kedudukan yang diperlukan oleh isyarat kawalan. Kaedah kawalan ini secara berkesan dapat meningkatkan ketepatan kawalan, menyesuaikan diri dengan pelbagai persekitaran kerja yang kompleks dan perubahan beban, dan digunakan secara meluas dalam medan automasi perindustrian dengan keperluan ketepatan kawalan yang tinggi, seperti kawalan injap kawalan aliran dalam pengeluaran kimia, kawalan injap dalam sistem kuasa, dan lain -lain.
Ciri -ciri dari Penggerak elektrik pelbagai giliran
l Kawalan ketepatan tinggi : Melalui algoritma kawalan lanjutan dan peranti maklum balas kedudukan yang tepat, penggerak elektrik pelbagai giliran dapat mencapai kawalan ketepatan tinggi pembukaan injap atau peralatan, dengan ketepatan kawalan ± 0.1% atau lebih tinggi. Ini membolehkan penyesuaian aliran sederhana, tekanan dan parameter lain semasa pengeluaran perindustrian, memastikan kestabilan proses pengeluaran dan konsistensi kualiti produk.
l Output tork besar : Mekanisme pengurangan yang dilengkapi dengan penggerak elektrik berbilang giliran boleh menukar output berkelajuan tinggi dan rendah tork motor ke dalam kelajuan rendah dan tinggi torque output aci output. Pelbagai tork output boleh dari puluhan meter Newton hingga puluhan ribu meter Newton, yang dapat memenuhi keperluan memandu injap dan peralatan lain dari spesifikasi dan jenis yang berbeza, dan sangat sesuai untuk memandu injap besar dan berat.
l Kelajuan tindak balas pantas : Setelah menerima isyarat kawalan, penggerak elektrik pelbagai giliran dapat bertindak balas dengan cepat, memandu motor untuk memulakan, menghentikan atau mengubah arah dengan cepat, dan merealisasikan tindakan cepat peralatan. Bagi sesetengah injap yang perlu dibuka dan ditutup dengan cepat, seperti injap penutupan kecemasan, penggerak elektrik pelbagai giliran dapat menyelesaikan pembukaan atau penutupan injap dalam masa yang singkat untuk memastikan keselamatan proses pengeluaran.
l Kebolehpercayaan yang tinggi : Penggerak elektrik pelbagai giliran menggunakan teknologi motor matang dan komponen penghantaran mekanikal yang boleh dipercayai. Selepas pemeriksaan kualiti yang ketat dan ujian ketahanan, mereka mempunyai kebolehpercayaan dan kestabilan yang tinggi. Di bawah keadaan kerja yang normal, masa min antara kegagalan (MTBF) boleh mencapai ribuan atau bahkan puluhan ribu jam, mengurangkan penyelenggaraan peralatan dan downtime dan meningkatkan kecekapan pengeluaran.
l Tahap kecerdasan yang tinggi : Penggerak elektrik berbilang pusingan moden biasanya dilengkapi dengan pengawal pintar, yang mempunyai fungsi seperti komunikasi data, diagnosis kesalahan, perlindungan diri, dan kawalan jauh. Melalui antara muka komunikasi (seperti Rs485, Modbus, Prdariibus, dan lain -lain), data boleh ditukar dengan sistem kawalan atas untuk mencapai pemantauan dan operasi jauh. Pada masa yang sama, pengawal pintar boleh memantau status operasi penggerak dalam masa nyata, menganalisis parameter seperti arus motor, suhu, kedudukan, dan lain -lain, mengesan dan mendiagnosis kesalahan dalam masa, dan mengambil langkah -langkah perlindungan yang sepadan, seperti perlindungan overcurrent, perlindungan overload, perlindungan overload, dan lain -lain, untuk meningkatkan keselamatan dan kebolehpercayaan peralatan.
l Kesesuaian yang kuat : Penggerak elektrik berbilang giliran boleh disesuaikan mengikut persekitaran kerja yang berbeza dan keperluan aplikasi, seperti bukti letupan, kalis air, bukti debu, dan lain-lain. Penggerak elektrik berbilang ledakan boleh beroperasi dengan selamat dalam persekitaran berbahaya yang mudah terbakar dan letupan dan digunakan secara meluas dalam industri seperti petroleum, kimia, dan gas semula jadi; Penggerak elektrik pelbagai kalis air dan debu-bukti yang sesuai untuk persekitaran yang lembap, berdebu dan lain-lain, seperti loji rawatan kumbahan, lombong dan tempat lain.
Kawasan permohonan dari Penggerak elektrik pelbagai giliran
1. Industri tenaga
l Minyak dan gas : Dalam proses pengekstrakan minyak dan gas, pengangkutan dan pemprosesan, penggerak elektrik pelbagai giliran digunakan secara meluas untuk mengawal pelbagai injap. Sebagai contoh, dalam peranti kepala, mereka digunakan untuk mengawal pembukaan dan penutupan injap pokok Krismas untuk mencapai peraturan pengekstrakan minyak dan gas yang tepat; Pada saluran paip minyak dan gas, mereka mengawal injap pintu, injap berhenti, dan lain -lain untuk memastikan operasi yang selamat dan peraturan aliran saluran paip; Dalam kilang penapis dan loji pemprosesan gas asli, ia digunakan untuk mengawal pelbagai injap proses untuk mencapai kawalan automatik pemisahan minyak dan gas, pemurnian dan proses proses lain.
l Elektrik : Penggerak elektrik pelbagai giliran memainkan peranan penting dalam bidang pengeluaran kuasa seperti penjanaan kuasa terma, penjanaan kuasa hidro, dan penjanaan kuasa nuklear. Dalam loji kuasa terma, ia digunakan untuk mengawal injap air dandang, injap stim, peredam pembakar, dan lain -lain, untuk mencapai kawalan tepat proses pembakaran dandang, aliran stim dan paras air, dan memastikan operasi stabil set penjana; Dalam tumbuhan kuasa hidro, ia digunakan untuk mengawal pembukaan vane pembukaan dan injap masuk air turbin, menyesuaikan output turbin, dan mencapai kawalan penjanaan kuasa; Dalam loji kuasa nuklear, mereka digunakan untuk mengawal injap penyejuk dan injap keselamatan reaktor nuklear, dan memastikan operasi loji kuasa nuklear yang selamat dan stabil.
2. Industri kimia
Proses pengeluaran kimia melibatkan banyak tindak balas kimia yang kompleks dan pengangkutan bahan, yang memerlukan ketepatan kawalan yang sangat tinggi dan kebolehpercayaan injap. Penggerak elektrik pelbagai giliran digunakan secara meluas dalam pelbagai pautan pengeluaran kimia, seperti pengangkutan bahan mentah, kawalan proses tindak balas, pemisahan produk dan pembersihan, dan lain-lain. Sebagai contoh, dalam reaktor kimia, pembukaan injap suapan dan injap pelepasan dikawal untuk menyesuaikan kadar aliran dan reaksi dengan tepat masa reaksi untuk memastikan kemajuan yang lancar dari reaksi kimia; Dalam menara penyulingan, injap refluks dan injap pelepasan dikawal untuk mencapai kawalan tepat proses penyulingan dan meningkatkan kesucian dan kualiti produk.
3. Air Konservasi industri
Dalam projek-projek pemeliharaan air, penggerak elektrik berbilang giliran digunakan untuk mengawal pelbagai injap hidraulik, seperti injap pintu pelepasan banjir empangan, injap pengalihan air dalam sistem pengairan, pintu gerbang dan injap berhenti dalam sistem bekalan air bandar, dan lain Sebagai contoh, sebelum banjir datang, injap pintu pelepasan banjir dapat dibuka dengan cepat dengan mengendalikan jauh penggerak elektrik multi-giliran untuk mengalirkan banjir tepat pada masanya dan memastikan keselamatan empangan dan kawasan hiliran; Dalam musim pengairan, pembukaan injap lencongan air boleh diselaraskan dengan tepat mengikut permintaan air tanah ladang untuk mencapai penggunaan sumber air yang cekap.
4. Metalurgi Industri
Dalam proses pengeluaran metalurgi, adalah perlu untuk mengawal media suhu tinggi, tekanan tinggi, dan media yang sangat menghakis. Penggerak elektrik pelbagai giliran sesuai untuk pelbagai persekitaran yang keras dalam industri metalurgi dan digunakan untuk mengawal injap udara panas, injap gas, injap mengangkat lance oksigen untuk penukar keluli, dan lain-lain.
5. Pembinaan dan kejuruteraan perbandaran
Dalam bidang pembinaan dan kejuruteraan perbandaran, penggerak elektrik berbilang giliran digunakan untuk mengawal injap dalam sistem pemanasan, pengudaraan dan penghawa dingin (HVAC) di bangunan, seperti injap air panas, injap udara segar, dan lain-lain, untuk mencapai penyesuaian automatik suhu dalaman, kelembapan dan kualiti udara, dan meningkatkan kecekapan dan tenaga dalaman. Di dalam sistem rawatan dan sistem rawatan kumbahan, penggerak elektrik pelbagai giliran digunakan untuk mengawal pintu slaid, injap periksa, injap pengawalseliaan, dan lain-lain untuk memastikan keselamatan bekalan air bandar dan operasi normal rawatan kumbahan.
Teknologi Pengeluaran of Penggerak elektrik pelbagai giliran
1. Pemprosesan bahagian
l Pembuatan motor : Pilih reka bentuk motor yang sesuai mengikut jenis motor yang berbeza (seperti motor AC, motor DC, motor stepper, motor servo). Bagi motor AC, adalah perlu untuk menjalankan proses seperti menumbuk teras stator, penggulungan dan memasukkan, dan pembuatan pemutar; Bagi DC Motors, ia juga perlu untuk mengeluarkan komutator dan memasang peranti berus. Semasa proses pembuatan motor, terdapat keperluan yang ketat untuk pemilihan bahan teras, ketepatan menumbuk, dan rawatan penebat penggulungan untuk memastikan prestasi dan kebolehpercayaan motor.
l Pemprosesan Mekanisme Pengurangan : Bahagian utama mekanisme pengurangan, seperti gear cacing, aci cacing, gear, dan lain-lain, biasanya diproses dengan bahan logam berkualiti tinggi (seperti keluli aloi, aloi tembaga, dan lain-lain). Gear cacing dan aci cacing biasanya dihasilkan melalui proses beralih, penggilingan, pengisaran dan lain -lain untuk memastikan ketepatan profil gigi dan kekasaran permukaan; Gear diproses melalui hobbing, membentuk, mencukur dan proses lain, dan rawatan haba (seperti pelindapkejutan, pembiakan, dan lain -lain) diperlukan untuk meningkatkan kekerasan dan rintangan memakai gear.
l Pembuatan perumahan dan bahagian lain : Perumahan penggerak elektrik multi-giliran biasanya dihasilkan oleh pemprosesan logam atau lembaran logam. Proses pemutus boleh menggunakan pemutus pasir, pemutus mati dan kaedah lain untuk menghasilkan perumahan dengan bentuk yang kompleks; Pemprosesan logam lembaran menggunakan ricih, lenturan, kimpalan dan proses lain untuk menghasilkan perumahan padat. Di samping itu, ia juga perlu memproses dan mengeluarkan pelbagai bahagian standard seperti aci, kunci, kacang, dan bahagian bukan standard seperti kurungan pemasangan untuk peranti maklum balas kedudukan (seperti potentiometer dan encoder).
2. Perhimpunan dan Pentauliahan
l Perhimpunan Komponen : Pertama, kumpulkan motor yang diproses dan mekanisme pengurangan untuk memastikan bahawa aci output motor dan aci input mekanisme pengurangan disambungkan dengan tepat dan concentricity memenuhi keperluan. Kemudian pasang peranti maklum balas kedudukan dan sambungkannya ke aci output atau komponen penghantaran penggerak untuk memastikan ketepatan maklum balas kedudukan. Kemudian pasang komponen elektrik seperti papan litar kawalan, blok terminal, panel paparan, dan komponen operasi manual seperti tangan dan cengkaman. Semasa proses perhimpunan, adalah perlu untuk mengikut keperluan proses pemasangan, mengawal pelepasan yang sepadan antara komponen, menggunakan alat pengetatan dan tork yang sesuai untuk memastikan kualiti pemasangan.
l Debugging mesin : Selepas pemasangan, penggerak elektrik berbilang giliran sepenuhnya didebitkan. Pertama, ujian prestasi elektrik dijalankan untuk memeriksa sama ada rintangan penebat, memulakan arus, berjalan semasa dan parameter lain motor memenuhi piawaian; Kemudian ujian prestasi kawalan dijalankan untuk memeriksa sama ada kelajuan tindak balas penggerak, ketepatan kedudukan, arah tindakan, dan lain -lain adalah betul dengan memasukkan isyarat kawalan yang berbeza; Pada masa yang sama, isyarat maklum balas peranti maklum balas kedudukan diuji tepat dan konsisten dengan kedudukan sebenar. Semasa proses penyahpepijatan, masalah yang dijumpai diselaraskan dan diperbaiki tepat pada masanya untuk memastikan penunjuk prestasi penggerak memenuhi keperluan reka bentuk.
3. Ujian dan pensijilan kualiti
l Pemeriksaan Kualiti : Penggerak elektrik pelbagai giliran perlu menjalani pemeriksaan kualiti yang ketat sebelum meninggalkan kilang, termasuk pemeriksaan penampilan, pengukuran dimensi, ujian prestasi, dan lain-lain. Pemeriksaan penampilan terutamanya memeriksa sama ada shell mempunyai calar, ubah bentuk, penumpahan salutan dan kecacatan lain; Pengukuran dimensi memastikan bahawa dimensi setiap komponen memenuhi keperluan lukisan reka bentuk; Ujian prestasi, sebagai tambahan kepada ujian prestasi elektrik dan ujian prestasi elektrik yang disebutkan di atas, juga termasuk ujian tork penggerak, tahap perlindungan (seperti kalis air, debu, prestasi letupan), ketahanan, dan lain-lain dengan meniru persekitaran kerja dan keadaan kerja yang sebenar.
l Pensijilan : Untuk memenuhi keperluan industri dan pasaran yang berlainan, penggerak elektrik berbilang giliran perlu mendapatkan pensijilan yang relevan, seperti pensijilan CE (yang mematuhi piawaian keselamatan, kesihatan dan alam sekitar), pensijilan pengunderaitan (pensijilan. piawaian dan spesifikasi, dan daya saing pasaran dan pengiktirafan produk diperbaiki.
Catatan sebelumnya
Bagaimanakah penggerak elektrik linear mencapai gerakan linear yang tepat melalui kawalan servo kedudukan?
Produk berkaitan
-
")
-

Cat:Suku Giliran Penggerak Elektrik
Peranti elektrik injap berputar separa QM termasuk jenis suis biasa, jenis integral, jenis pengawalseliaan, jenis pin...
Lihat butiran








Hubungi kami
Bentuk masa depan produk dengan kami!
Pautan cepat
Maklumat hubungan
- Alamat : Taman Perindustrian Laoli, Kampung Chaoyang, Hengshan Bridge Town, Daerah Wujin, Kota Changzhou, Wilayah Jiangsu, China
- Telefon: 0086 15335008985
- E -mel :
Mudah alih
Hak Cipta 2024 Changzhou Xinneng Automatic Control Equipment Co., Ltd Semua hak terpelihara.
