0086 15335008985
Cat:Penggerak elektrik berbilang giliran
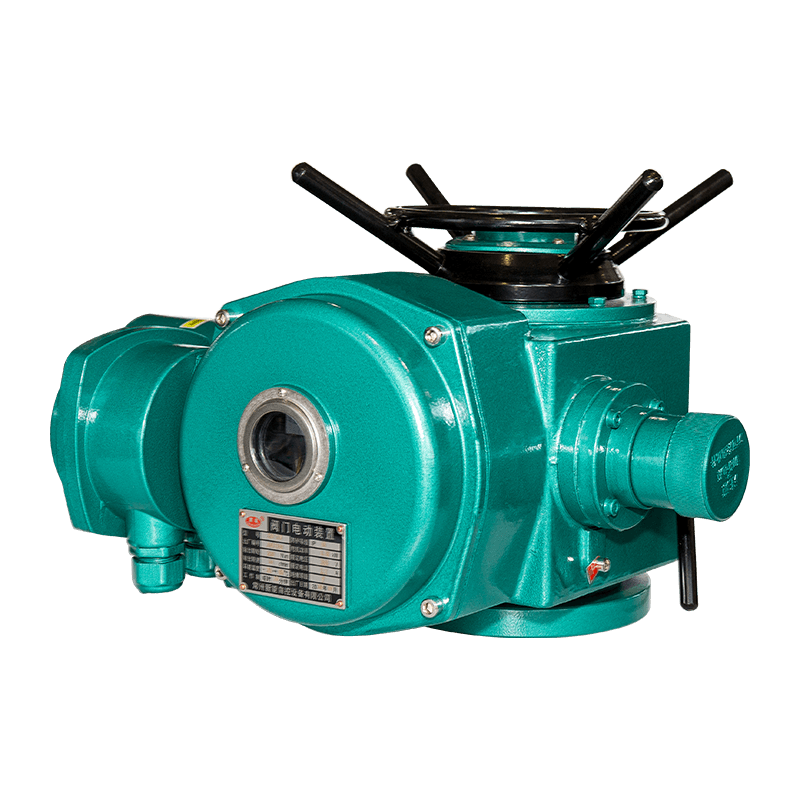
Siri CND-Z adalah peranti elektrik yang tidak invasif yang tidak masuk akal yang memperkenalkan teknologi digital ana...
Lihat butiran
0086 15335008985


 Cari
Cari
Dalam sistem automasi perindustrian moden, penggerak elektrik pelbagai turn bertanggungjawab untuk memandu injap utama yang tepat, dan prestasi mereka secara langsung mempengaruhi kestabilan dan kebolehpercayaan keseluruhan proses. Menghadapi keadaan kerja yang kompleks seperti turun naik tekanan saluran paip, perubahan suhu, atau perubahan dalam ciri-ciri sederhana, penggerak kawalan gelung terbuka tradisional sering dibatasi oleh kekurangan keupayaan penyesuaian masa nyata, manakala penggerak elektrik pelbagai giliran menggunakan teknologi kawalan gelung tertutup telah menunjukkan ketepatan penyesuaian dan kawalan yang sangat baik dengan penyesuaian dinamik mereka dan kemampuan penyesuaian.
Inti kawalan gelung tertutup terletak pada maklum balas masa nyata dan pembetulan dinamik. Penggerak elektrik pelbagai giliran terus mengumpul kedudukan injap, beban dan data alam sekitar melalui sensor kedudukan ketepatan tinggi terbina dalam, sensor tork dan modul pemantauan suhu, dan membandingkannya dengan arahan kawalan dalam masa nyata. Sebaik sahaja sisihan dikesan, sistem kawalan segera menyesuaikan output motor untuk memastikan bahawa trajektori gerakan penggerak dengan ketat sepadan dengan sasaran yang diharapkan. Sebagai contoh, dalam sistem saluran paip industri petrokimia, tekanan sederhana mungkin berubah -ubah dengan ganas disebabkan oleh perubahan aliran proses. Penggerak gelung terbuka tradisional hanya boleh beroperasi secara mekanikal mengikut strok pratetap dan tidak dapat mengatasi kejutan tekanan terbalik secara tiba-tiba, yang dengan mudah boleh membawa kepada sisihan kedudukan injap atau beban motor. Penggerak kawalan gelung tertutup dapat merasakan perubahan tekanan dalam milisaat dan secara dinamik menyesuaikan tork output, memastikan bahawa injap berada di tempat dengan tepat dan mencegah kerosakan pada struktur mekanikal akibat beban.
Kesan perubahan suhu pada penggerak tidak boleh diabaikan. Dalam persekitaran suhu yang sangat tinggi atau rendah, pengembangan haba dan penguncupan bahagian mekanikal, perubahan prestasi pelinciran, dan kestabilan komponen elektronik mungkin terjejas. Oleh kerana kekurangan penyesuaian alam sekitar, sistem gelung terbuka terdedah kepada kedudukan drift atau tindak balas yang perlahan selepas operasi jangka panjang. Penggerak elektrik multi-turn kawalan gelung tertutup menggunakan algoritma pampasan suhu yang digabungkan dengan maklum balas kedudukan masa nyata untuk secara automatik membetulkan kesilapan ubah bentuk mekanikal yang disebabkan oleh suhu untuk memastikan pembukaan injap sentiasa memenuhi keperluan kawalan. Sebagai contoh, dalam sistem penyimpanan dan pengangkutan kriogenik LNG, penggerak injap mungkin menghadapi persekitaran yang sangat sejuk di bawah -160 ° C. Sistem gelung tertutup terus memantau dan menyesuaikan parameter pemacu motor untuk membolehkan penggerak mengekalkan operasi yang stabil di bawah keadaan suhu ultra-rendah.
Perubahan sifat fizikal atau kimia medium juga menimbulkan cabaran untuk mengawal injap. Dalam senario seperti rawatan kumbahan, tindak balas kimia atau pemprosesan makanan, faktor -faktor seperti kelikatan cecair, keterujaan, dan kandungan bahan partikulat mungkin berubah dengan tahap proses, mengakibatkan perubahan dinamik dalam pembukaan injap dan penutupan rintangan. Oleh kerana penggerak gelung terbuka tidak dapat merasakan perubahan beban, mereka mungkin disekat disebabkan oleh peningkatan rintangan secara tiba-tiba, atau ayunan overshoot mungkin berlaku disebabkan oleh penurunan rintangan. Penggerak elektrik berbilang giliran dengan kawalan gelung tertutup secara bijak mengenal pasti perubahan dalam ciri-ciri beban dan secara automatik menyesuaikan lengkung operasi dengan pemantauan masa nyata mengenai output semasa dan tork motor. Sebagai contoh, dalam saluran paip yang menyampaikan medium likat, apabila kelikatan bendalir meningkat disebabkan oleh penurunan suhu, penggerak boleh meningkatkan tork output secara dinamik sambil mengoptimumkan kelajuan pembukaan dan penutupan untuk mengelakkan kegagalan kawalan disebabkan oleh beban atau jamming.
Di samping mengatasi keadaan kerja yang kompleks, kawalan gelung tertutup juga memberikan penggerak elektrik yang lebih tinggi dan kelebihan kehidupan yang lebih tinggi. Dalam situasi yang tidak normal seperti beban, gerai atau turun naik kuasa, sistem gelung terbuka tradisional sering bergantung pada klac mekanikal atau perlindungan fius, yang bertindak balas dengan lag dan boleh menyebabkan kerosakan peralatan. Sistem gelung tertutup meramalkan potensi risiko terlebih dahulu melalui analisis data masa nyata, dan mengambil langkah-langkah perlindungan aktif seperti pengurangan kelajuan, mengehadkan semasa atau brek kecemasan. Sebagai contoh, apabila tork injap tiba-tiba meningkat disebabkan oleh masalah asing, pengawal gelung tertutup dapat dengan cepat memotong kuasa sebelum mencapai had mekanikal dan mencetuskan penggera untuk mengelakkan kerosakan kekal pada gear pengurangan atau batang injap. Mekanisme perlindungan yang berpandangan ke hadapan bukan sahaja meningkatkan kebolehpercayaan peralatan, tetapi juga mengurangkan kos penyelenggaraan.
Oleh kerana automasi perindustrian berkembang ke arah kecerdasan, teknologi kawalan gelung tertutup Penggerak elektrik pelbagai giliran juga terus berkembang. Algoritma kawalan lanjutan moden, seperti PID adaptif, logik kabur dan juga rangkaian saraf ringan, diperkenalkan ke dalam strategi kawalan penggerak, membolehkannya mempelajari mod tindak balas yang optimum di bawah keadaan kerja yang berbeza. Sebagai contoh, dalam proses pelarasan berkala, penggerak secara automatik boleh menghafal ciri -ciri geseran dan undang -undang perubahan beban injap, untuk mengimbangi terlebih dahulu dalam operasi seterusnya dan mengurangkan kesilapan pelarasan. Keupayaan pengoptimuman diri ini terus meningkatkan kesesuaian penggerak dalam persekitaran yang kompleks, menjadikannya unit pelaksanaan utama untuk kawalan proses ketepatan tinggi.

Siri CND-Z adalah peranti elektrik yang tidak invasif yang tidak masuk akal yang memperkenalkan teknologi digital ana...
Lihat butiranHak Cipta 2024 Changzhou Xinneng Automatic Control Equipment Co., Ltd Semua hak terpelihara.









